Collective processes of activity and control in neuromorphic dynamic networks
Neuromorphic dynamic networks reproduce the hierarchical structure of real neural systems and take into consideration the structure and properties of individual neurons and interneuronic couplings. A series of theoretical and experimental investigations of collective spatio-temporal activity of neuromorphic dynamic networks have been carried out under the supervision of V. I. Nekorkin and V. B. Kazantsev.
Regular and polymorphic localized activity patterns in a two-dimensional neural network
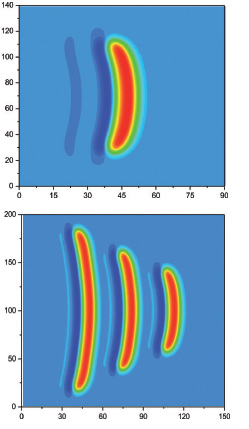
The studies of the collective excitation processes in a two-dimensional network consisting of neurons with complex threshold properties revealed spatially localized regular and polymorphic activity patterns – isolated groups of neurons synchronously generating action potentials. The shape of the excited area of the regular patterns does not depend on time. The shape of the excited area of the polymorphic patterns can perform periodic, quasiperiodic or chaotic oscillations. It was found that of key importance for formation of regular patterns is the presence of an oscillatory excitation threshold in the network elements, and for formation of polymorphic patterns the “balance” between the increase of the pattern size in the direction transverse to the motion and the action of boundary network elements localized in the longitudinal direction that suppress activity (V. I. Nekorkin, A. S. Dmitrichev).
Cellular automata on oriented graphs of synaptic couplings in studies of the activity of excitable neural networks
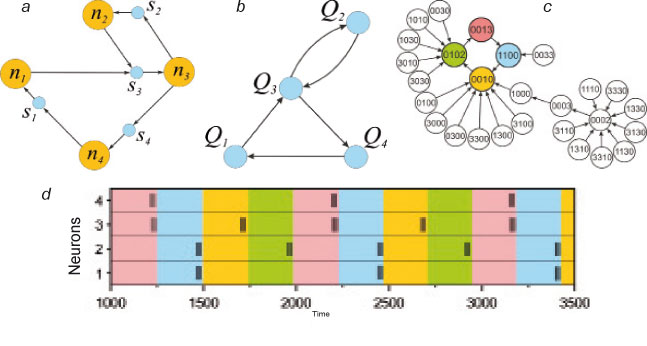
A new method for description and investigation of the dynamics of neural networks with excitatory synaptic couplings was developed. The method is based on reducing the continuous neural network dynamics to the discrete dynamics of cellular automata constructed on oriented graphs of synaptic couplings. The proposed reduction scheme makes use of the dynamic properties of synapses and does not depend on the individual dynamics of neurons. As a result, a discrete model is obtained in the form of cellular automata in which each synapse is described by a limited number of states and the rules of synapse transition from one state to another are specified. Modes of collective dynamics of the initial neural network are found from the analysis of the states of cellular automata. The method is quite universal, may be used for description of processes in various neural networks, and was tested on Morris – Lecar and Hodgkin – Huxley neuronal ensembles (A. S. Dmitrichev, D. V. Kasatkin, V. I. Nekorkin).
Generation of motor patterns in a neurodynamic system controlling a hexapod walking robot
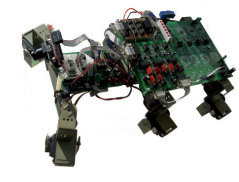
The investigations of the dynamics of olivocerebellar system and thalamocortical interactions resulted in development of a system of multiparametric control using nonlinear dynamic mechanisms of phase cluster formation. An electronic prototype of a system controlling a walking robot was created. The control scheme is based on a network of coupled nonlinear oscillators with phase reset. The motor patterns represent clusters of synchronous oscillations with a given phase shift between the oscillators. They are formed on the basis of predefined motor pattern templates specifying the main directions of robot movements and processing of the input sensor signal from a camera (D. S. Shchapin, A. S. Dmitrichev, V. B. Kazantsev, V. I. Nekorkin).
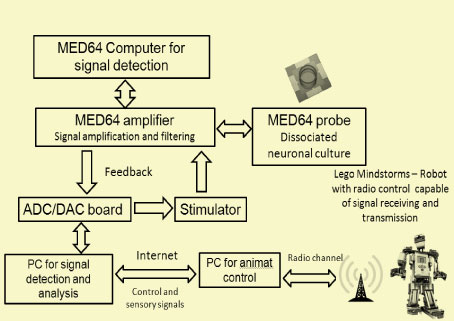
Development of models and prototypes of neurohybrid systems
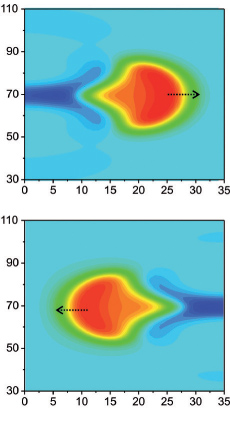
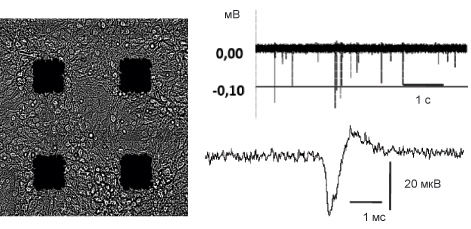
A prototype of a multielectrode neurobiosensor capable of recording bioelectric signals of a neuronal culture, extracting and classifying activity patterns, generating a control signal to the operating units and stimulations by a feedback sensor signal was elaborated. A new method of pattern classification based on analysis of the activation and deactivation patterns of culture bioelectric discharges was developed. It was shown that the activity patterns display repeatability in their spatio-temporal profile and time scaling. A model of spontaneous bioelectric network signaling was developed and it was demonstrated that such discharges conform to the statistics of self-organized criticality and correspond to the percolation transition in the neural network. It was found that, thanks to the effect of synaptic plasticity, polychronous pulse patterns may be realized in neural networks with a possibility of obtaining any values of phase delay in pulse signal transmission from neuron to neuron.
Models of extracellular regulation of neural network activity due to the action of glial cells (astrocytes) and brain extracellular matrix were developed. It was found that such actions may adaptively change efficiency of interneuron connections, providing control of signal transmission in a neural network by means of chemical (extracellular) factors.
A model of "virtual neuronal network" capable of describing formation and evolution of realistic neuronal architectures based on description of processes of diffusion transport of building proteins and navigation of neuritis growth cone was developed.
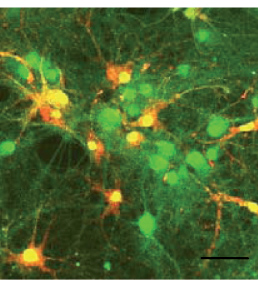
The goal of these studies is creation of models and prototypes of neurohybrid devices based on the interface between a living nerve tissue (dissociated neuronal cultures in vitro) and artificial operating devices – mobile robots (V. B. Kazantsev, I. V. Mukhina).
